










Serviços Personalizados
Journal
Artigo
 Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkMotricidade
versão impressa ISSN 1646-107X
Motri. vol.10 no.4 Ribeira de Pena dez. 2014
https://doi.org/10.6063/motricidade.10(4).2905
ORIGINAL ARTICLE
Effects of the amount and schedule of varied practice after constant practice on the adaptive process of motor learning
Efeitos da quantidade e do regime de prática variada após a prática constante sobre o processo adaptativo de aprendizagem motora
Umberto C. Corrêa1,*; Cinthya Walter1; Camila Torriani-Pasin1; João Barros2; Go Tani1
1Escola de Educação Física e Esporte, Universidade de São Paulo, São Paulo, Brasil
2Department of Kinesiology at California State University, Fullerton, USA
ABSTRACT
This study investigated the effects of different amounts and schedules of varied practice, after constant practice, on the adaptive process of motor learning. Participants were one hundred and seven children with a mean age of 11.1 ± 0.9 years. Three experiments were carried out using a complex anticipatory timing task manipulating the following components in the varied practice: visual stimulus speed (experiment 1); sequential response pattern (experiment 2); and visual stimulus speed plus sequential response pattern (experiment 3). In all experiments the design involved three amounts (18, 36, and 63 trials), and two schedules (random and blocked) of varied practice. The experiments also involved two learning phases: stabilization and adaptation. The dependent variables were the absolute, variable, and constant errors related to the task goal, and the relative timing of the sequential response. Results showed that all groups worsened the performances in the adaptation phase, and no difference was observed between them. Altogether, the results of the three experiments allow the conclusion that the amounts of trials manipulated in the random and blocked practices did not promote the diversification of the skill since no adaptation was observed.
Keywords: adaptive system, practice schedule, variability, coincident timing
RESUMO
Este estudo investigou os efeitos de diferentes quantidades estruturas de prática variada, após a prática constante, no processo adaptativo de aprendizagem motora. Os participantes foram 107 crianças com idade média de 11.1 ± 0.9 anos. Três experimentos foram realizados usando uma tarefa de timing antecipatório complexo manipulando os seguintes componentes na prática variada: velocidade visuais estímulo (experimento 1); padrão de resposta sequencial (experimento 2), e velocidade de estímulo visual mais padrão de resposta sequencial (experimento 3). Em todos os experimentos, o design envolveu três quantidades (18, 36 e 63 ensaios), e dois regimes (aleatória e por blocos) da prática variada. Os experimentos também envolveram duas fases de aprendizagem: estabilização e adaptação. As variáveis dependentes foram os erros absoluto, variável e constante relacionados ao objetivo da tarefa, e o timing relativo para avaliar o padrão de resposta. Os resultados mostraram que todos os grupos pioraram os desempenhos na fase de adaptação, e nenhuma diferença entre eles foi observada. No seu conjunto, os resultados dos três experimentos permitem concluir que as quantidades de tentativas manipuladas nas práticas aleatória e por blocos não promoveram a diversificação da habilidade desde que não foi observada nenhuma adaptação.
Palavras-chave: processo adaptativo, estrutura de prática, variabilidade, timing coincidente
INTRODUCTION
Motor skills are among those phenomena that have most intrigued scientists over the centuries (Connolly, 2000), probably because their biological, psychological, social, cultural and evolutionary importance to human beings are without question. Motor skills, as other human skills are essentially adaptive behaviors because they are the means by which individuals constantly interact with their changing environment.
In the last few years a non-equilibrium model has been developed in order to explain motor skill learning as an adaptive process (Choshi, 1985, 2000; Choshi & Tani, 1983; Tani, 2005a). Non-equilibrium models are characterized by the interplay of positive and negative feedback mechanisms, i.e., they explain the motor skill learning by considering its nonlinear and self-organizational characteristics (Tani et al., 2014). The adaptive process model considers motor learning as comprised by two phases: stabilization and adaptation. In the stabilization phase, initially inconsistent and incorrect responses are gradually reduced by a negative feedback mechanism. As a result, a functional stabilization is achieved, which means the formation of a structure, i.e., pattern (Corrêa, Ugrinowitsch, Benda, & Tani, 2010a; Corrêa, Alegre, Freudenheim, Santos, & Tani, 2012; Tani, 1995, 2005b).
In this model the skill structure is assumed to be organized in two hierarchical levels: macroscopic and microscopic. The macrostructure corresponds to the overall pattern which emerges from the interaction between the system’s components, which is responsible for consistency in the actions consistent. And, the microstructure refers to the individuals components. It is oriented to disorder, leading to variability in the actions. Functional stabilization, and the skill macro and microstructure have been accessed, respectively, by measures related to the (i) goal task, (ii) sequencing, relative size, and relative timing, and (iii) total size, and movement time (Tani et al., 2014, for details).
In open systems the new environmental demands and changes in the task’s goal may challenge (or perturb) the learner, even when stabilization is achieved. In such situations, they need to adapt. Thus, the adaptation phase refers to the reorganization of a pre-existing structure, which implies a breakdown of stability followed by another regimen of stability. Adaptation in this case can take place in three different ways: (i) based on the flexibility of the previously acquired structure, that is, keeping the structure and modifying only the movement parameters (e.g., overall time, direction, and force of movement); (ii) by the reorganization of the structure itself, that is, changing the way some components or parts (e.g., relative timing of a component) of the previous structure interact; or (iii) through the emergence of a completely new structure, that is, a new pattern of interaction between components.
This adaptive process model of motor learning has stimulated two main research lines. The first one has been developed in order to investigate the model’s propositions (Fonseca, Benda, Profeta, & Ugrinowitsch, 2012; Ugrinowitsch & Tani, 2004). Results have shown that the adaptation depends on the levels of the stabilization achieved and on type of perturbation introduced.
In the second line of research, the adaptive process model has been investigated regarding the effects of practice schedules (Corrêa, Benda, Meira Jr., & Tani, 2003; Corrêa et al., 2010a). Practice is a sine qua non condition for learning. The main question has been how adaptive process takes place when the process of stabilization is carried out under different practice schedules. The results of this body of studies have indicated that the constant followed by random practice (constant-random) promotes better adaptation than the constant, random, and random followed by constant (random-constant) practice schedules. For instance, Corrêa et al. (2010a) using a complex coincident timing task showed that when the modification in the task involved changes in perceptual and motor requirements simultaneously (e.g., velocities of the visual stimulus and sequences of responses), the constant-random group adapted by reorganizing the acquired structure; similar result was observed when the task was modified only in terms of motor requirements, but when the modification was perceptual, the adaptation did not demand any modification of the acquired structure.
As an explanation of these results, it has been hypothesized that the benefits of the constant-random practice for the adaptive process are mainly due to the effect of earlier constant practice. This sequence of practice allows the formation of an initial structure of the task so that the subsequent variations by random practice promote its diversification. According to Corrêa et al. (2010a), diversification can be thought as a process of applying different parameters to the skill structure that increases its flexibility facilitating adaptation. To put it in another way, the varied practice promote the increase of an array of skill parameters, items, values or/and appropriate solutions for a given motor problem (Ugrinowitsch, Corrêa & Tani, 2005).
Based on those findings further studies have been carried out in order to verify in which stabilization level (i.e., stage of structure formation) the process of skill diversification could be initiated. Three studies investigated this problem (Corrêa, Gonçalves, Barros, & Massigli, 2006; Corrêa, Barros, Massigli, Gonçalves, & Tani, 2007; Corrêa et al., 2010b). In each one the design involved three groups of different amounts of constant practice, before random practice. These experiments were different in relation to the aspects of the task manipulated during the random practice (perceptual, motor, and both aspects). Results showed that in all studies the varying amounts of constant practice prior to random practice had similar effects on the adaptive process. Therefore, it was concluded that the minimum amount of practice needed to the formation of the structure was enough for initiating the skill diversification process. It seems that the minimum amount of practice was sufficient to put the learners into a region of self-organized criticality. In such a region a given system becomes located at the border or edge of chaos ready for creation, innovation, and evolution (Kauffman, 1993; Langton, 1992; Packard, 1988). Thus, one could say that the minimum amount of practice could prepare the learner for diversification.
From this point, we sought to investigate the practice during the diversification process. Two main questions were posed: whether the amount of practice in the diversification process would affect the adaptation, and whether the diversification of motor skills could occur in a different schedule of varied practice (random and blocked). In fact, blocked practice has been used in numerous motor learning studies in the last four decades as an alternative to random practice (see Brady, 1998, 2004; Magill & Hall, 1990; for a review). While random practice is characterized by the execution of different tasks in a non-systematic or unpredictable way, the blocked practice is characterized by a sequence of stable conditions because the learner performs all trials of each task variation before moving to next variation. Therefore, the aim of this study was to investigate the effects of different amounts and schedules of varied practice after constant practice on the adaptive process of motor learning.
EXPERIMENT 1
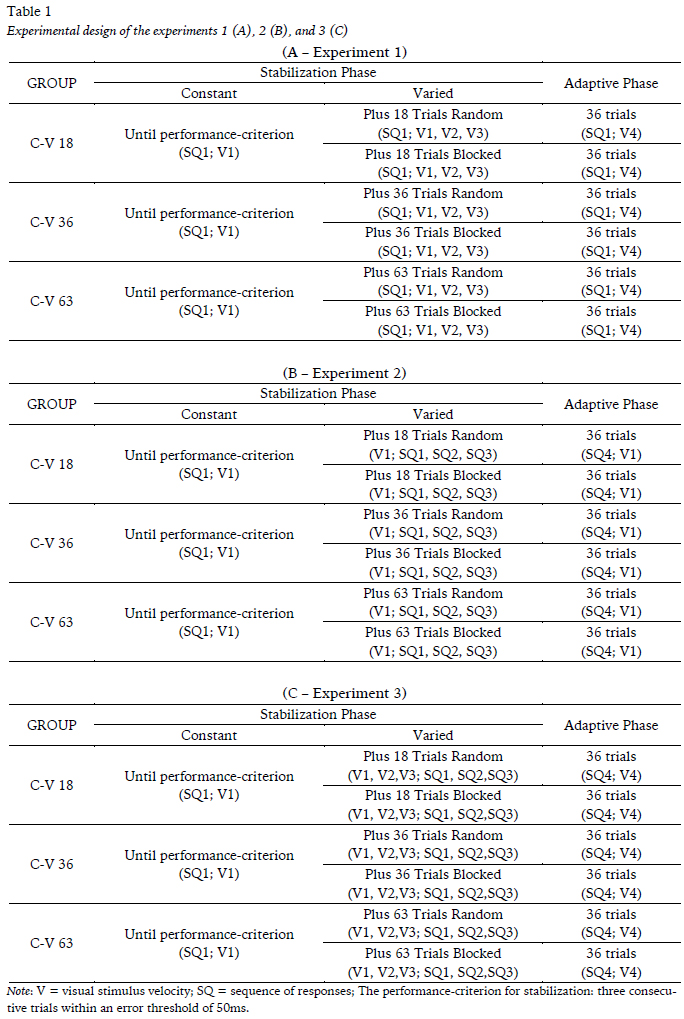
In this experiment the random and blocked practices were manipulated in relation to perceptual requirements of the task, that is, different visual stimulus speeds (Table 1A).
Participants
Participants, task, and apparatus were similar to those used by Corrêa and colleagues in previous studies (Corrêa et al., 2006, 2007, 2010a, 2010b). Thirty-six right-handed children, both boys (n = 20) and girls (n = 16), with a mean age of 11.6 years (SD = 0.5) took part in the experiment. Participation required the written consent of those responsible for the children. The study was approved by the Institutional Review Board of the University of São Paulo.
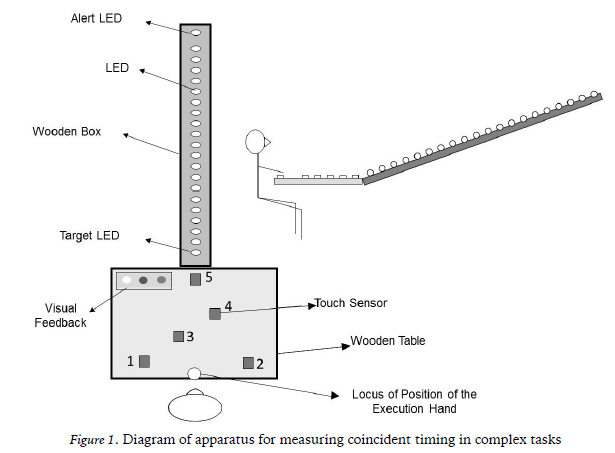
Instruments and task A complex coincident timing apparatus was used (Fig. 1). The task required the participants to touch with the dominant hand five response keys during the presentation of a visual stimulus, so that the touch on the last one coincided with the lighting of the final led (see Fig. 1). The visual stimulus consisted of a sequence of LEDs that started to light in a sequence two seconds after the participant has been warned by LED alert.
Design and procedures
The design utilized characterized this research as quasi-experimental. The experiment involved the stabilization and adaptation phases. In the first, the children performed the trials under constant practice until the following performance-criterion for stabilization: three consecutive trials within an error threshold of ±50 msec. Studies have shown that inexperienced adults can stabilize their performance at ±30 msec error threshold in this kind of task (Fonseca et al., 2012). However, children need ±50 msec to do that (Corrêa et al., 2006, 2007, 2010a, 2010b). Thus, the criterion of three consecutive trials within an error threshold of ±50 msec was used in this study in order to guarantee that all learners reach the same performance level. After achieving that they performed the practice trials under either random or blocked practice.
According to Table 1A, children of C-V 18 groups performed 18 trials under random (C-R 18) or blocked practice (C-B 18). The C-V 36 groups performed 36 trials under random (C-R 36) or blocked practice (C-B 36), and the C-V 63 groups performed 63 trials under random (C-R 63) or blocked practice (C-B 63).
In the stabilization phase, while the practice was constant the children performed the trials in the same sequence of responses (SQ1=1-2-4-3-5, Figure 1) and visual stimulus speed (V1= 1.422 m/s). Subsequent trials were performed varying the visual stimulus speeds (V1= 1.422 m/s; V2= 1.657 m/s; and V3= 1.245 m/s) according to the varied condition (random or blocked). In this phase the children received knowledge of results after each trial by one 10 cm wide, 20 cm long and 2 cm high box with diodes that indicated that the performance was within (central diode) or out of criterion (right or left diode), respectively, when the individual touched the sensor after or before that criterion (Fig. 1). Still, children were given explanations about the task, and they were informed that from the moment they reached the criterion of performance the speed of visual stimulus, touch sequence of the sensors, or both would begin to vary, according to each experiment. In the adaptation phase a new visual stimulus speed (V4 = 1.049 m/s) was introduced for all groups. No KR was provided in this phase. In both phases a six seconds interval between trials was provided.
Data analyses Data were analyzed in relation to two performance measures: (i) coincident timing and (ii) response pattern. The first one referred to the difference between the last touch and the firing LED target. It was analyzed in relation to absolute, variable, and constant errors in order to evaluate the performance concerning accuracy, consistency, and time bias of responses, respectively. To consider the interactions among amount of varied practice (18, 36, and 63 trials), schedule (random and blocked), and blocks of trials, 3 × 2 × 3 ANOVAs were conducted, with repeated measures on the last factor. To ensure the power of the statistical analyzes for all these interactions the last block of the stabilization phase and two blocks of the adaptation phase (first and last) were compared. Response pattern was analyzed by relative timing of each task component (C). It referred to the proportion of time of each task component in relation to the overall response time (time between the start of the visual stimulus and the performance of the last – fifth – touch). It consisted of six time intervals: the reaction time, i.e., the time between the firing of the first diode and the beginning of the movement, i.e., withdrawal of the dominant hand of a sensor (C1) and the time before each of the five subsequent touches (C2, C3, C4, C5, and C6). In order to verify how the adaptation took place in terms of response pattern, the analyses considered the last block of the stabilization phase and the first block of the adaptation phase. A 6 × 2 ANOVA was carried out for each group to identify main effects of components and blocks of trials. Observed significant effects were followed up using TukeyHSD post-hoc tests. For all analyses, the level of significance was set at p< 0.05, using STATISTICA® 10.0 software (Stat Soft Inc., Tulsa, USA). The observed difference in the degrees of freedom reported in the ANOVA’s results referred to the missing data caused by outliers and technical problems related to the software. For instance, outliers emerged when the children performed a wrong sequence of movements, repeated or missed a particular sensor, or forgot to finish the sequence (e.g., to perform the last touch).
RESULTS
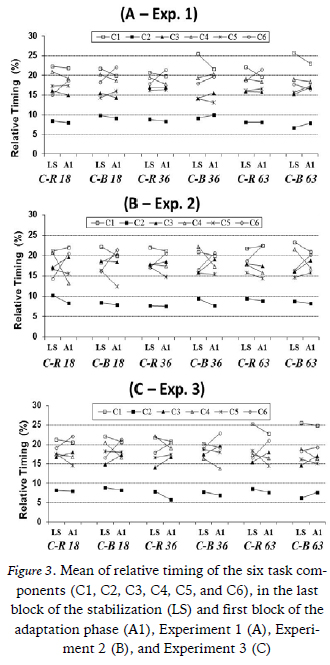
The performances related to the coincident timing and to the response pattern are presented at the Figures 2A and 3A, respectively.
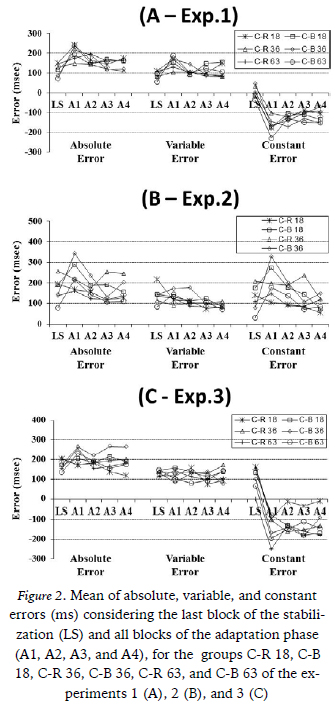
Coincident timing
For absolute error, a 3 × 2 × 3 ANOVA (amount of varied practice × practice schedule × blocks of trials) revealed interaction between blocks and practice schedule (F(2, 64)= 8.84, p< 0.01, ?2= 0.22). It was observed that the constant-blocked practice groups increased error from the last block of the stabilization phase to the first of adaptation block (p< 0.01), and decreased from first to last adaptation block (p< 0.01).
Concerning variable error, a 3 × 2 × 3 ANOVA (amount of varied practice × practice schedule × blocks of trials) also revealed an interaction between practice schedule and blocks (F(2, 64)= 3.26, p< 0.05, ?2= 0.09). Post hoc testing showed that the constant-blocked practice groups increased the variable error from the last block of the stabilization phase to the first adaptation block (p< 0.01), and diminished from first to last adaptation block (p< 0.01).
Finally, for constant error a 3 × 2 × 3 ANOVA (amount of varied practice × practice schedule × blocks of trials) revealed effects only for blocks (F(2, 64)= 55.31, p< 0.01, ?2= 0.64). Post hoc testing showed that this error changed from positive (execution of the final touch after the firing LED target) to negative signal (execution of the final touch before the firing LED target), from the last block of the stabilization phase to all adaptation blocks (p< 0.01), and diminished from first to last adaptation block (p< 0.05).
Response pattern
For all groups, the 6 × 2 ANOVA revealed main interaction effects between components and blocks of trials: C-V 18 R (F(5, 25)= 17.58, p< 0.01), C-V 18 BL (F(5, 25)= 13.61, p< 0.01), C-V 36 R (F(5, 25)= 22.59, p< 0.01), C-V 36 BL (F(5, 25)= 21.89, p< 0.01), C-V 63 R (F(5, 25)= 20.95, p< 0.01), and C-V 63 BL (F(5, 25)= 35.16, p< 0.01). Post hoc testing showed that with the introduction of the new visual stimulus velocity all groups changed their response pattern by diminishing the relative timing of the first and fourth components (p< 0.01).
EXPERIMENT 2
In this experiment, the varied practice (blocked and random) was manipulated in relation to the movement pattern, that is, different sequences of touches in the sensors (Table 1B).
Participants, task and equipment, design and procedures, and data analyses These aspects were similar to those of experiment 1. Participants were thirty-six children, both boys (n= 18) and girls (n= 18), with mean age of 11.4 years (SD = 1.0). In this experiment, during the constant practice the learners performed the task trials in the same sequence of touches in the sensors (SQ1= 1-2-4-3-5, Figure 1) and visual stimulus speed (V1= 1.422 m/s). Subsequent trials were performed varying the sequence of touches (SQ1= 1-2-4-3-5, SQ2= 1-3-2-4-5 e SQ3= 1-4-2-3-5, Figure 1) according to varied condition (random or blocked). For adaptation phase a new movement pattern (SQ4= 1-4-3-2-5, Figure 1) was introduced for all groups. Regarding the variability of the touch sequence of the sensors, children were visually informed, before each trial by a paper put on the left corner of the table.
RESULTS
The performances related to the coincident timing and to the response pattern are presented at the Figures 2B and 3B, respectively.
Coincident timing For absolute error, a 3 × 2 × 3 ANOVA (amount of varied practice x practice schedule x blocks of trials) revealed interaction between practice schedule and blocks (F(2, 62)= 6.13, p< 0.01, ?2= 0.16). It was observed that the constant-blocked practice groups increased the absolute error from the last block of the stabilization phase to the first adaptation block (p< 0.01), and decreased from first to last adaptation block (p< 0.01). Regarding variable error, a 3 × 2 × 3 ANOVA (amount of varied practice × practice schedule × blocks of trials) revealed effects only for blocks (F(2, 58)= 3.45, p< 0.05, ?2= 0.10). Post hoc testing showed that this error diminished from last block of the stabilization phase to the last blocks of the adaptation phase (p< 0.01). And, in relation to the constant error, a 3 × 2 × 3 ANOVA (amount of varied practice × practice schedule × blocks of trials) revealed interaction between blocks and practice schedule (F(2, 62)= 4.83, p< 0.05, ?2= 0.13). Similarly to the absolute error, the TukeyHSD tests showed that the constant-blocked groups increased the absolute error from the last block of the stabilization phase to the first adaptation block (p< 0.01), and decreased from first to last adaptation block (p< 0.01).
Response pattern For all groups the 6 × 2 ANOVA revealed main interaction effects between components and blocks of trials: C-V 18 R (F(5, 20)= 8.82, p< 0.01), C-V 18 BL (F(5, 25)= 17.03, p< 0.01), C-V 36 R (F(5, 25)= 12.59, p< 0.01), C-V 36 BL (F(5, 25)= 21.72, p< 0.01), C-V 63 R (F(5, 25)= 14.91, p< 0.01), and C-V 63 BL (F(5, 25)= 14.51, p< 0.01). Post hoc testing showed that with the introduction of the new sequence of touching all groups changed their response pattern by reducing the relative timing of the first and fourth components (p< 0.01). Furthermore, there was an increase of the relative timing of sixth component for the C-V 18 BL and C-V 63 R groups (p< 0.01), and of the second component for the C-V 36 BL group (p< 0.05) (Figure 3B).
EXPERIMENT 3
In this experiment, the varied practices were manipulated both in terms of velocities of the visual stimulus and sequences of touching.
Participants, task and equipment, design and procedures, and data analyses
These aspects were also similar to those of experiment 1 and 2 (Table 1C). Participants were thirty-five children, both boys (n= 18) and girls (n= 17), with mean age of 10.4 years (SD = 1.0).
In this experiment, during the constant practice the learners performed the task trials in the same sequence of touches in the sensors (SQ1= 1-2-4-3-5, Figure 1) and visual stimulus speed (V1= 1.422 m/s). The remaining trials were performed varying the sequence of touches (SQ1= 1-2-4-3-5, SQ2= 1-3-2-4-5 e SQ3= 1-4-2-3-5, Figure 1) and the visual stimulus speeds (V1= 1.422 m/s; V2= 1.657 m/s; and V3= 1.245 m/s) according to varied condition (random or blocked). For adaptation phase a new movement pattern (SQ4= 1-4-3-2-5, Figure 1) and visual stimulus speed (V4 = 1.049 m/s) were introduced for all groups.
RESULTS
The performances related to the coincident timing and the response pattern are presented at the Figures 2C and 3C, respectively.
Coincident timing The statistical analysis revealed no differences for the absolute, variable, and constant errors.
Response pattern
For all groups the 6 × 2 ANOVA revealed main interaction effects between components and blocks of trials: C-V 18 R (F(5, 25)= 21.65, p< 0.01), C-V 18 BL (F(5, 20)= 26.19, p< 0.01), C-V 36 R (F(5, 25)= 25.02, p< 0.01), C-V 36 BL (F(5, 25)= 6.70, p< 0.01), C-V 63 R (F(5, 25)= 13.47, p< 0.01), and C-V 63 BL (F(5, 25)= 15.33, p< 0.01). Post hoc testing showed that with the introduction of the new sequence of touching all groups changed their response pattern by reducing the relative timing of the first and fourth components (p< 0.01). Furthermore, there was an increase of the relative timing of the sixth component for the C-V 18 R group (p< 0.01), and of the second component for the C-V 36 R group (p< 0.01).
DISCUSSION
The aim of this study was to investigate the effects of different amounts and schedules of varied practice after constant practice on the adaptive process of motor learning. We asked whether the amount and schedule of varied practice for diversification of the skill in terms of different task demands (e.g., perceptual and motor) would affect the adaptive process of motor learning.
It was hypothesized that the varied practice of applying different parameters to the skill structure would promote its diversification, thus increasing its flexibility and facilitating adaptation, independently of the amount of practice. Actually, with regard to the amount of practice we expected that there would be a critical threshold in which the acquired flexibility would be enough to promote adaptation as in the case of systems placed in a region of self-organized criticality (Kauffman, 1993; Langton, 1992; Packard, 1988). For instance, Corrêa et al. (2006, 2007, 2010b) showed that varying amounts of constant practice prior to random practice had similar effects on the adaptive process, and they concluded that the minimum amount of practice needed to the formation of a structure was enough for initiating the diversification process.
However, the results of the three experiments suggest that the amounts and schedules of varied practice manipulated in this study did not promote the diversification of the skill. It is because a new regime of stability should be reached in the adaptive phase and it did not occur. For instance, in all blocks of adaptation phase the absolute error remained above 100 msec, that is, two times higher than the criterion of 50 msec considered for stabilization. Therefore, since the motor skill acquisition involves the formation of more complex structures by a breakdown of stability followed by another regime of stability in a cyclical way (Choshi, 1985, 2000; Choshi & Tani, 1983; Tani, 2005a) we could say that individuals failed to achieve the new stabilization of performance, given they remained with high levels of error.
It is important to note that the main focus is on the performance in the adaptive phase and not on the levels of performance during the varied practice in the stabilization phase. While in the varied practice we manipulated the independent variable (amount and schedule), the adaptation was the locus of the effect investigated. Actually, it was expected that the level of error would be higher during the varied practice than in the practice without variability because of the difficulty learners would have to use feedback during the varied practice. That is, while the constant practice allows the individuals to use information related to the previous trial in the next trial, the varied practice involves changes of that information trial to trial or of block to block.
Thus, it is possible that the diversification of the skill did not take place, and the flexibility of the formed skill structure with the constant practice had been insufficient to deal with the perturbation. In other words, the demands of the new task might have been beyond the predictability of the system (Corrêa et al., 2012) so that no adaptation was observed.
In addition to that we propose two possible explanations that obviously require investigation. First, the variations introduced after constant practice may have been inadequate to promote skill diversification. They may have acted as a perturbation to the pattern formed with constant practice. In other words, instead of promoting diversification, they may have impaired it, so that when the new task was introduced, the system was already disturbed. This hypothesis is based on the fact that neither the aspect of the task manipulated in the varied practice nor the amount of practice was able to positively affect the adaptation.
Second, although previous studies have pointed for performance-criterion of three consecutive trials within an error threshold of ±50 msec for achieving functional stabilization, i.e. structure/pattern formation (Corrêa et al., 2006, 2007, 2010a, 2010b), one could think that this may not have been enough to prepare the skill structure for the diversification process. In this regards, recent studies by Ugrinowitsch et al. (2010, 2011) have shown that the extensive practice during the stabilization phase can provide the learners with more capacity to adapt. For instance, Ugrinowitsch et al. (2010) investigated the effects of the stabilization level on adaptation in motor skill learning. They manipulated two performance-criteria: three consecutive trials with an error of = 25 msec and six blocks of three trials with an error of = 25 msec. Results showed better adaptation for those learners who practiced six blocks of three trials within the error level established.
Interestingly, our results also showed that the aforementioned effects did not occur equally with regard to the kinds of varied practice. For instance, the results of interactions between blocks and practice schedule observed in experiments 1 and 2, respectively those that varied the velocity of visual stimulus and sequence of touches, showed that only the performance of the constant-blocked groups worsened at the beginning of the adaptation phase. Furthermore, the behaviors of the groups were also different with regard to the response pattern. While in the experiment 1 they changed equally their response patterns by reducing the relative timing of the first and fourth components, in experiment 2 some groups changed their response pattern in relation to these components (first and fourth) and other altered it in relation to those first, fourth, and sixth . Furthermore, in experiment 3, results showed that the groups C-R 18 and C-R 36 altered their movement pattern in relation to the three components (first, fourth, and sixth; first, second, and fourth, respectively). The remaining groups changed only two components (first and fourth). Considering the propositions of adaptive process of motor learning described in the introduction and the level of performance of all groups in the adaptation phase, we could suggest that those modifications in the response patterns did not refer to an adaptation by the modifying the structure of the skill. Considering there was degradation of the performance in the adaptation phase, these alterations in components might indicate a system dismantling. There are basically three possibilities for responding when a system is perturbed. It can (i) attempt to neutralize the perturbation while maintaining stability, (ii) use the perturbation as source of order toward higher states of complexity. These two possibilities have as a prerequisite the competence acquired by the system. The absence of this implies the third possibility: (iii) the system is destroyed (Tani, 2005).
In the present study, after the initial characterization of the motor skill, i.e. structure formation by the constant practice, the diversification of the skill was the focus of analysis. It was operationalized by varying the quantity of trials of blocked or random practices. Three experiments were carried out in order to investigate the diversification in terms of the perceptual (exp. 1), motor (exp. 2), and perceptual coupled to motor aspects of the task (exp. 3). The findings of this study allow us to conclude that the amounts of trials manipulated in the random and blocked practices did not promote the diversification of the skill since no adaptation was observed. Concerning the study’s limitations two aspects warrant further investigations: (1) the establishment of different criteria for inferring the pattern formation considering both the value of the error as the number of trials, and (2) the variation of specific items practiced (e.g., values of velocities of visual stimulus) and/or the amount of specific items varied in the practice (e.g., amount of velocities of visual stimulus).
REFERENCES
Brady, F. (1998). A theoretical and empirical review of the contextual interference effect and learning of motor skills. Quest, 50, 266-293. [ Links ]
Brady, F. (2004). Contextual interference: A meta-analytic study. Perceptual and Motor Skills, 99, 116-126. doi: 10.2466/pms.99.1.116-126 [ Links ]
Choshi, K. (1985). Adaptive process of perceptual-motor learning: Complexity and complementarity. Memoirs of the Faculty of Integrated Arts and Sciences, 3, 21-30. [ Links ]
Choshi, K. (2000). Aprendizagem motora como um problema mal-definido. Revista Paulista de Educação Física, 3, 17-23. [ Links ]
Choshi, K., & Tani, G. (1983). Stable system and adaptive system in motor learning. In Japanese Association of Biomechanics (Ed.), The science of movement (pp. 346-351). Tokyo: Kiorin. [ Links ]
Connolly, K. (2000). Desenvolvimento motor: Passado, presente e futuro. Revista Paulista de Educação Física, 3, 6-15. [ Links ]
Corrêa, U. C., Benda, R. N., Meira Jr., C. M., & Tani, G. (2003). Practice schedule and adaptive process in the acquisition of a manual force control task. Journal of Human Movement Studies, 44, 121-38. [ Links ]
Corrêa, U. C., Barros, J. A., Massigli, M., Gonçalves, L. A., & Tani, G. (2007). A prática constante-aleatória e o processo adaptativo de aprendizagem motora: Efeitos da quantidade de prática constante. Revista Brasileira de Educação Física e Esporte, 21, 301-314. [ Links ]
Corrêa, U. C., Ugrinowitsch, H., Benda, R. N., & Tani, G. (2010a). Effects of practice schedule on the adaptive process of motor learning. Portuguese Journal of Sport Sciences, 10, 158-171. [ Links ]
Corrêa, U. C., Massigli, M., Barros, J. A. , Gonçalves, L. A., Tani, G., & Oliveira, J. A. (2010b). Constant-random practice and the adaptive process in motor learning with varying amounts of constant practice. Perceptual and Motor Skills, 110, 442-452. doi: 10.2466/pms.110.2.442-452. [ Links ]
Corrêa, U. C., Gonçalves, L. A., Barros, J. A., & Massigli, M. (2006). Prática constante-aleatória e aprendizagem motora: Efeitos da quantidade de prática constante e da manipulação de exigências motoras da tarefa. Brazilian Journal of Motor Behavior, 1, 41-52. [ Links ]
Corrêa, U. C., Alegre, F. A. M., Freudenheim, A. M., Santos, S., & Tani, G. (2012). The game of futsal as an adaptive process. Nonlinear Dynamics, Psychology and Life Sciences, 16, 185-204. [ Links ]
Fonseca, F. S., Benda, R. N., Profeta, V. L. S., & Ugrinowitsch, H. (2012). Extensive practice improves adaptation to unpredictable perturbations in a sequential coincident timing task. Neuroscience Letters, 517, 123-127. doi: 10.1016/j.neulet.2012.04.041 [ Links ]
Kauffman, S. A. (1993). The origins of order: Self-organization and selection in evolution. Oxford: Oxford University Press. [ Links ]
Langton, C. G. (1992). Life at the edge of chaos. In C. G. Langton, C. Taylor, J. D. Farmer, & S. Rasmussen (Eds.), Artificial life II: SFI studies in the sciences of complexity - V (pp. 41-92) Redwood City: Addison-Wesley. [ Links ]
Magill, R. A., & Hall, K. G. (1990). A review of the contextual interference effect in motor skill acquisition. Human Movement Science, 9(3-5), 241-289. doi: 10.1016/0167-9457(90)90005-X [ Links ]
Packard, N. H. (1988). Adaptation toward the edge of chaos. In J. A. S. Kelso, A. J. Mandel, & M. F. Shlesinger (Eds.), Dynamic patterns in complex systems (pp. 293-301). Singapore: World Scientific Publishing. [ Links ]
Tani, G. (1995). Hierarchical organization of an action programme and the development of skilled actions. (Unpublished technical report). Sheffield: University of Sheffield, Department of Psychology. [ Links ]
Tani, G. (2005a). Processo adaptativo: Uma concepção de aprendizagem motora além da estabilização. In G. Tani (Ed.), Comportamento motor: Aprendizagem e desenvolvimento (pp. 60-70). Rio de Janeiro: Guanabara Koogan. [ Links ]
Tani, G. (2005b). Programação motora: Organização hierárquica, ordem e desordem. In G. Tani (Ed.), Comportamento motor: Aprendizagem e desenvolvimento (pp. 82-105). Rio de Janeiro: Guanabara Koogan. [ Links ]
Tani, G., Corrêa, U. C., Basso, L., Benda, R. N., Ugrinowitsch, H., & Choshi, K. (2014). An adaptive process model of motor learning: Insights for the teaching of motor skills. Nonlinear Dynamics Psychology and Life Sciences, 18, 47-65. [ Links ]
Ugrinowitsch, H., Corrêa, U.C., & Tani, G. (2005). Perturbação perceptiva e processo adaptativo na aprendizagem de uma tarefa de timing coincidente. Revista Brasileira de Educação Física e Esporte, 19, 277-284. [ Links ]
Ugrinowitsch, H., Fialho, J., Fonseca, F., Profeta, V., Albuquerque, M., & Benda, R. N. (2010). Effects of perceptive perturbation and level of stabilization in motor learning adaptability. International Journal of Sport Psychology, 41, S.113-S.114. [ Links ]
Ugrinowitsch, H., Santos-Naves, S. P., Carbinatto, M. V., Benda, R. N., & Tani, G. (2011). Motor skill adaptation depends on the level of learning. International Journal of Human and Social Sciences, 6, 177-181. [ Links ]
Ugrinowitsch, H., & Tani, G. (2004). Perceptive perturbation in different levels of performance's stabilization and adaptive process in motor learning. The FIEP Bulletin, 74(special issue), 38-41. [ Links ]
Acknowledgments:
Nothing to declare.
Conflicts of Interest:
Nothing to declare.
Funding:
Nothing to declare.
Manuscript received September 30, 2013; Revised December 19, 2013; Accepted March 14, 2014
*Corresponding author: School of Physical Education and Sport - University of São Paulo, Av. Prof. Mello Moraes, 65, Cidade Universitária, CEP 05508-030 São Paulo, SP - Brazil; E-mail: umbertoc@usp.br


{kind=link}
{kind=link}